Участник:Почернина Елена/Метод Якоби вычисления сингулярных чисел и векторов
 | Эта работа прошла предварительную проверку Дата последней правки страницы: 08.12.2016 Данная работа соответствует формальным критериям. Проверено ASA. |
| Метод Якоби вычисления сингулярных чисел и векторов | |
| Последовательный алгоритм | |
| Последовательная сложность | [math]O(n^3)[/math] |
| Объём входных данных | [math]n^2[/math] |
| Объём выходных данных | [math]2n^2 + n[/math] |
| Параллельный алгоритм | |
| Высота ярусно-параллельной формы | [math]O(n^2)[/math] |
| Ширина ярусно-параллельной формы | [math]O(n)[/math] |
Авторы статьи: Почернина Елена, группа 601 (разделы 1.1, 1.2, 1.4, 1.5, 1.6, 1.8, 2.4, 2.7), Костюкова Светлана, группа 601 (разделы 1.3, 1.5, 1.7, 1.9, 1.10, 2.4)
Содержание
- 1 Свойства и структура алгоритма
- 1.1 Общее описание алгоритма
- 1.2 Математическое описание алгоритма
- 1.3 Вычислительное ядро алгоритма
- 1.4 Макроструктура алгоритма
- 1.5 Схема реализации последовательного алгоритма
- 1.6 Последовательная сложность алгоритма
- 1.7 Информационный граф
- 1.8 Ресурс параллелизма алгоритма
- 1.9 Входные и выходные данные алгоритма
- 1.10 Свойства алгоритма
- 2 Программная реализация алгоритма
- 2.1 Особенности реализации последовательного алгоритма
- 2.2 Локальность данных и вычислений
- 2.3 Возможные способы и особенности параллельной реализации алгоритма
- 2.4 Масштабируемость алгоритма и его реализации
- 2.5 Динамические характеристики и эффективность реализации алгоритма
- 2.6 Выводы для классов архитектур
- 2.7 Существующие реализации алгоритма
- 3 Литература
1 Свойства и структура алгоритма
1.1 Общее описание алгоритма
Метод Якоби позволяет найти сингулярное разложение плотной матрицы [math]G[/math] размера [math]n[/math]×[math]n[/math]. Такое разложение можно записать в виде [math]G = U\Sigma V^*[/math], где [math]U, V[/math] - унитарные (в вещественном случае - ортогональные) матрицы размера [math]n[/math]×[math]n[/math], [math]\Sigma[/math] - диагональная матрица размера [math]n[/math]×[math]n[/math] с вещественными положительными числами на главной диагонали. Диагональные элементы матрицы [math]\Sigma[/math] называются сингулярными числами матрицы [math]G[/math], а столбцы матриц [math]U,V[/math] - левыми и правыми сингулярными векторами.
Неявный[1] метод Якоби математически эквивалентен применению метода Якоби вычисления собственных значений к матрице [math]A = G^TG[/math]. Это значит, что на каждом шаге вычисляется вращение Якоби [math]J[/math], с помощью которого матрица [math]G^TG[/math] неявно пересчитывется в [math]J^TG^TGJ[/math]; вращение выбрано так, чтобы пара внедиагональных элементов из [math]G^TG[/math] обратилась в нули в матрице [math]J^TG^TGJ[/math]. При этом ни [math]G^TG[/math], ни [math]J^TG^TGJ[/math] не вычисляются в явном виде; вместо них вычисляется матрица [math]GJ[/math]. Поэтому алгоритм называется методом односторонних вращений.
Метод Якоби для вычисления сингулярных чисел и векторов является самым медленным из имеющихся алгоритмов поиска сингулярных чисел и векторов, но тем не менее, интерес к нему сохраняется. Для некоторых некоторых типов матриц [math]G[/math] он способен вычислять сингулярные числа и векторы намного точнее, чем другие методы. В частности, метод Якоби вычисляет сингулярные числа матрицы [math]G[/math] с высокой точностью, если G может быть представлена в виде [math]G = DX[/math], где [math]D[/math] – диагональная матрица, а [math]X[/math] – хорошо обусловлена. В этом случае заданная матрица обрабатывается без предварительного приведения к двухдиагональному виду, в то время как другие алгоритмы включают в себя приведение матрицы к двухдиагональной форме, из-за чего и теряют все верные разряды во всех сингулярных числах, кроме старшего.
1.2 Математическое описание алгоритма
Исходные данные: матрица [math]G[/math] (элементы [math]g_{ij}, i, j = 1, \ldots, n[/math]).
Вычисляемые данные: матрица [math]\Sigma = diag(\sigma_{i})[/math], где [math]\sigma_{i}[/math] - сингулярные числа, [math]U[/math] - матрица левых сингулярных векторов, [math]V[/math] - матрица правых сингулярных векторов.
Основной алгоритм заключается в следующем[2]:
Для всех элементов матрицы [math]A^{(i)} = (G^TG)^{(i)}[/math], находящихся вне главной диагонали [math](a_{12}, a_{13},\dots, a_{1n}, a_{23}, a_{24},\dots, a_{2n},\dots, a_{n-1n})[/math] проверяем условие [math]|A_{jk}|\lt \varepsilon[/math]: Если [math]|A_{jk}^{(i)}| \le \varepsilon[/math], то переходим к следующему элементу, Если [math]|A_{jk}^{(i)}| \gt \varepsilon[/math], то нужно выполнить вращение в плоскости [math](j,k)[/math], после чего перейти к следующей итерации алгоритма. Если на очередной итерации не было совершено ни одного вращения, значит матрица [math]A[/math] стала достаточна близка к диагональной, и можно перейти к вычислению искомых значений:
[math]\sigma_i = ||G(:,i)||_2[/math];
[math]U = [u_1,\dots,u_n][/math], где [math]u_i = G(:,i)/\sigma_i[/math];
[math]V = J[/math], где [math]J[/math] - накопленное произведение вращений Якоби.
Одностороннее вращение в плоскости [math](j,k)[/math] осуществляет процедура One-Sided-Jacobi-Rotation[math](G,j,k)[/math]:
proc One-Sided-Jacobi-Rotation[math](G,j,k)[/math] вычислить [math]a_{jj} = (G^TG)_{jj}, a_{jk} = (G^TG)_{jk}[/math] и [math]a_{kk} = (G^TG)_{kk}[/math] if [math]|a_{jk}|[/math] не слишком мал [math] \begin{align} \tau &= \frac{a_{jj} - a_{kk}}{2a_{jk}} \\ t &= \frac{sign(\tau)}{|\tau| + \sqrt{1 + \tau^2}} \\ c &= \frac{1}{\sqrt{1 + t^2}} \\ s &= ct \\ G &= GR(j,k,\theta) \ \dots c=cos\theta, s=sin\theta \end{align}[/math] if нужны правые сингулярные векторы [math]J = JR(j,k,\theta)[/math] end if end if
Здесь [math]R(j,k,\theta)[/math] - матрица вращений Якоби. Матрица вращений выбирается так, чтобы обнулить пару внедиагональных элементов[3].
[math] \begin{matrix} & & & & j & & k & & & \\ \end{matrix} [/math]
[math] J_i = R(j,k,\theta) = \begin{matrix} \\ \\ \\ j \\ \\ k \\ \\ \\ \\ \end{matrix} [/math] [math] \begin{bmatrix} & 1 & & & & & & & & \\ & & 1 & & & & & & & \\ & & & \ddots & & & & & & \\ & & & & \cos(\theta) & & -\sin(\theta) & & & \\ & & & & & \ddots & & & & \\ & & & & \sin(\theta) & & \cos(\theta) & & & \\ & & & & & & & \ddots & & \\ & & & & & & & & 1 & \\ & & & & & & & & & 1 \\ \end{bmatrix} [/math]
При совпадении диагональных элементов [math](a_{jj} = a_{kk})[/math] считаем [math]\theta = \frac{\pi}{4}[/math].
Для завершения описания алгоритма, нужно указать критерий останова, то есть объяснить смысл условия "если [math]a_{jk}[/math] не слишком мал". Подходящим критерием останова является условие [math]\begin{align} |a_{jk}| \ge \varepsilon\sqrt{a_{jj}a_{kk}} \end{align}[/math].
1.3 Вычислительное ядро алгоритма
Вычислительное ядро составляют множественные вычисления элементов матрицы [math]a_{jj} = (G^TG)_{jj}, a_{jk} = (G^TG)_{jk}[/math] и [math]a_{kk} = (G^TG)_{kk}[/math], а также вычисление промежуточной матрицы [math]GR(j, k, \theta)[/math] путем умножения исходной матрицы на матрицу вращения Якоби в процессе выполнения процедуры One-Sided-Jacobi-Rotation[math](G,j,k)[/math].
После приведения матрицы [math]G^TG[/math] к виду, достаточно близкому к диагональному, вычисляются сингулярные числа:
[math]\sigma_i = ||G(:,i)||_2[/math]
Матрица левых сингулярных векторов [math]U = [u_1,..., u_n][/math]:
[math]u_i = G(:,i)/\sigma_i[/math]
И (если требуется) матрица правых сингулярных векторов [math]V[/math] путем накопления произведения вращений Якоби:
[math] V = J, J = JR(j, k, \theta) [/math]
1.4 Макроструктура алгоритма
Основную часть метода составляет процедура односторонних вращений матрицы (процедура One-Sided-Jacobi-Rotation[math](G,j,k)[/math]). Рассмотрим подробнее структуру этой процедуры.
- Вычисление [math]a_{jk}, a_{jj}, a_{kk} (a_{ij} = (G^TG)_{ij})[/math]. В связи с тем, что нет необходимости каждый раз вычислять произведение [math]G^TG[/math], для вычисления каждого элемента требуется [math]n[/math] операций умножения и [math](n-1)[/math] операций сложения.
- Вычисление [math]\tau, c, s, t[/math] не представляют значительной вычислительной сложности.
- Одностороннее вращение матрицы (умножение входной матрицы на матрицу вращения) требует порядка [math]O(n)[/math] операций.
В итоге, процедура One-Sided-Jacobi-Rotation требует [math]O(n)[/math] операций.
После выполнения алгоритма односторонних вращений необходимо вычислить искомые матрицы [math]S, U, V[/math] (матрица сингулярных чисел и матрицы левых и правых векторов).
- Вычисление сингулярных чисел [math]\sigma_i[/math] требует [math]n[/math] операций умножения.
- Вычисление [math]U[/math] требует [math]O(n^2)[/math] операций. Аналогично для матрицы [math]V[/math].
1.5 Схема реализации последовательного алгоритма
Метод можно описать следующим образом[4]:
repeat
for [math]j=1[/math] to [math]n-1[/math]
for [math]k=j+1[/math] to [math]n[/math]
обратиться к процедуре One-Sided-Jacobi-Rotation[math](G,j,k)[/math]
end for
end for
пока [math]G^TG[/math] не станет достаточно близка к диагональной матрице
Положить [math]\sigma_{i} = ||G(:,i)||_2 [/math] (норма [math]i[/math]-го столбца в [math]G[/math])
Положить [math]U = [u_{1},\dots, u_{n}][/math], где [math]u_{i} = G(:,i)/\sigma_{i}[/math]
Положить [math]V = J[/math], где [math]J[/math] - накопленное произведение вращений Якоби.
Метод Якоби для нахождения сингулярных чисел и векторов матрицы [math]G[/math] также использует метод односторонних вращений (процедура One-Sided-Jacobi-Rotation). Алгоритм выглядит следующим образом:
proc One-Sided-Jacobi-Rotation[math](G,j,k)[/math] вычислить [math]a_{jj} = (G^TG)_{jj}, a_{jk} = (G^TG)_{jk}[/math] и [math]a_{kk} = (G^TG)_{kk}[/math] if [math]|a_{jk}|[/math] не слишком мал [math] \begin{align} \tau &= \frac{a_{jj} - a_{kk}}{2a_{jk}} \\ t &= \frac{sign(\tau)}{|\tau| + \sqrt{1 + \tau^2}} \\ c &= \frac{1}{\sqrt{1 + t^2}} \\ s &= ct \\ G &= GR(j,k,\theta) \ \dots c=cos\theta, s=sin\theta \end{align}[/math] if нужны правые сингулярные векторы [math]J = JR(j,k,\theta)[/math] end if end if
1.6 Последовательная сложность алгоритма
Для вычисления сингулярных чисел и векторов матрицы порядка [math]n[/math] в последовательном варианте на каждой итерации алгоритма вызывается процедура One-Sided-Jacobi-Rotation[math](G,j,k)[/math], сложность которой равна [math]O(n)[/math]. Так как выбор индексов [math]j[/math] и [math]k[/math] осуществляется путем перебора внедиагональных элементов матрицы, для полного прохода потребуется [math]\frac{n(n-1)}{2}[/math] итераций.
Таким образом, метод Якоби вычисления сингулярных чисел и векторов при классификации по последовательной сложности относится к алгоритмам с кубической сложностью.
1.7 Информационный граф
Граф алгоритма состоит из трех групп вершин:
Первая группа вершин расположена в двумерной области, соответствующая ей операция - вычисление [math]a_{jj}, a_{jk}, a_{kk}[/math]. Естественно введённые координаты области таковы:
- [math]j[/math] — меняется в диапазоне от [math]1[/math] до [math]n-1[/math], принимая все целочисленные значения;
- [math]k[/math] — меняется в диапазоне от [math]j+1[/math] до [math]n[/math], принимая все целочисленные значения.
Вторая группа вершин соответствует вычислению значений [math]c[/math] и [math]s[/math] для матрицы вращения
Третья группа вершин соответствует вычислению произведений матриц [math]GR(k,j, \theta)[/math] и [math]JR(k,j, \theta)[/math]
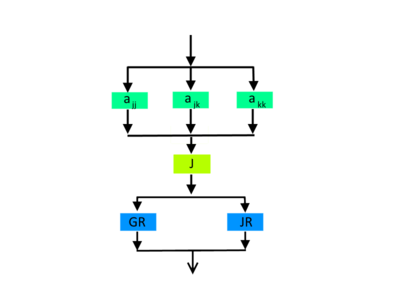
Рисунок 1. Граф одной итерации алгоритма без отображения входных и выходных данных.
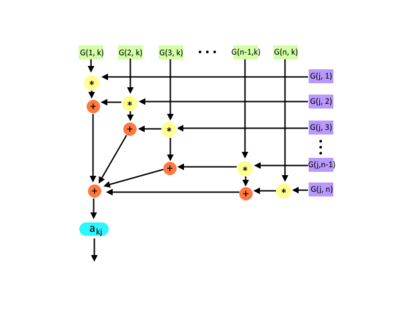
Рисунок 2. Граф вычисления значений элементов [math]a_{jj}, a_{jk}, a_{kk}[/math].


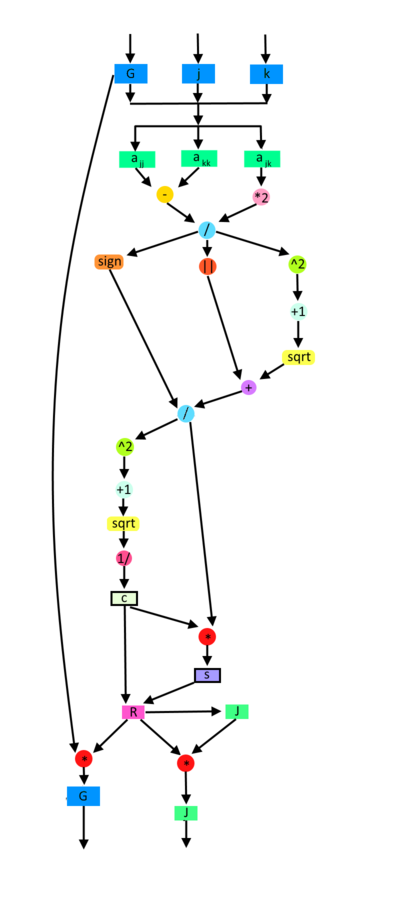
Рисунок 3. Граф одной итерации алгоритма с вычислением матрицы вращения [math]R[/math] отображением входных и выходных данных.

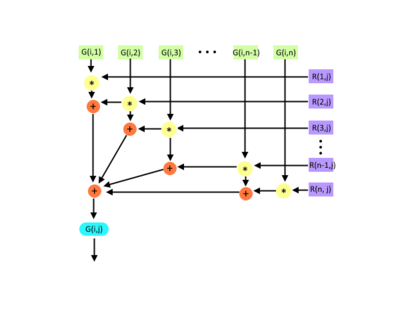
Рисунок 4. Граф вычисления значений элементов матрицы [math]GR[/math]
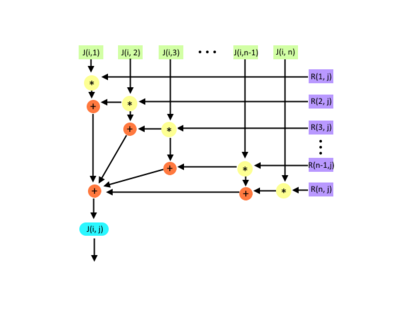
Рисунок 5. Граф вычисления значений элементов матрицы [math]JR[/math]


1.8 Ресурс параллелизма алгоритма
В данном алгоритме существует возможность параллельного вычисления вращений Якоби[5][6]. Максимальное количество вращений в данном методе равно [math]\frac{n(n-1)}{2}[/math]. В параллельной реализации, если [math]n[/math] - четное, можно выполнить [math]\frac{n}{2}[/math] вращений параллельно, если [math]n[/math] - нечетное, то [math]\frac{n-1}{2}[/math] вращений.
Основную сложность в процедуре вращения One-Sided-Jacobi-Rotation[math](G,j,k)[/math] представляет вычисление элементов [math]a_{jj}, a_{jk}, a_{kk}[/math], которое можно производить параллельно. Вычисление элементов [math]a_{jj}, a_{jk}, a_{kk}[/math] требует порядка [math]O(logN)[/math] операций. Вычисление элементов матриц [math]GR, JR[/math] в параллельной реализации требует [math]O(1)[/math] операций.
Таким образом, при классификации по высоте ЯПФ метод Якоби относится к алгоритмам со сложностью [math]O(n^2)[/math], а при классификации по ширине ЯПФ — к алгоритмам со сложностью [math]O(n)[/math].
1.9 Входные и выходные данные алгоритма
Входные данные: плотная матрица [math]G[/math] (элементы [math]g_{ij}[/math]). Дополнительные ограничения:
- [math]A= G^TG[/math] – симметрическая матрица, т. е. [math]a_{ij}= a_{ji}, i, j = 1, \ldots, n[/math].
Объём входных данных: [math]n^2[/math]
Выходные данные: матрица [math]\Sigma = diag(\sigma_{i})[/math], где [math]\sigma_{i}[/math] - сингулярные числа, матрица [math]U[/math] левых сингулярных векторов и матрица [math]V[/math] правых сингулярных векторов.
Объём выходных данных: [math]2n^2 + n[/math] (так как матрица сингулярных чисел [math]\Sigma[/math] - диагональная, то достаточно хранить вектор сингулярных чисел (элементы [math]\sigma_i[/math]), а также две матрицы [math]U, V[/math] левых и правых сингулярных векторов).
1.10 Свойства алгоритма
Метод Якоби является самым медленным из имеющихся алгоритмов вычисления сингулярных чисел и сингулярных векторов матрицы. Тем не менее, для некоторых некоторых типов матриц [math]G[/math] он способен вычислять сингулярные числа и векторы намного точнее, чем другие методы. Кроме того, в методе Якоби заданная матрица обрабатывается без предварительного приведения к двухдиагональному виду, за счет этого метод достигает высокой относительной точности.
Соотношение последовательной и параллельной сложности в случае неограниченных ресурсов для метода Якоби является линейным, вычислительная мощность алгоритма также линейна.
Метод Якоби не детерминирован, так как является итерационным алгоритмом с выходом по точности (число итераций зависит от входных данных и порогового значения).
2 Программная реализация алгоритма
2.1 Особенности реализации последовательного алгоритма
2.2 Локальность данных и вычислений
2.3 Возможные способы и особенности параллельной реализации алгоритма
2.4 Масштабируемость алгоритма и его реализации
2.4.1 Масштабируемость алгоритма
Оценки предела масштабируемости алгоритма были рассмотрены в разделе Ресурс параллелизма алгоритма.
2.4.2 Масштабируемость реализации алгоритма
Проведём исследование масштабируемости параллельной реализации метода Якоби нахождения сингулярных чисел и векторов. Исследование проводилось на суперкомпьютере "Ломоносов" Суперкомпьютерного комплекса Московского университета.
Набор и границы значений изменяемых реализации алгоритма:
- число процессоров [1:16] с шагом 1;
- размер матрицы [100 : 900] с шагом 100.
В результате проведенных экспериментов был получен следующий диапазон эффективности реализации алгоритма:
- минимальная эффективность реализации: 0.0095%
- максимальная эффективность реализации: 0.929%
При запуске использовалась версия mkl 11.2.0.
Компилятор icc запускался со следующими опциями: -DMKL_ILP64 -qopenmp -I${MKLROOT}/include -Wl,--start-group ${MKLROOT}/lib/intel64/libmkl_intel_ilp64.a ${MKLROOT}/lib/intel64/libmkl_core.a ${MKLROOT}/lib/intel64/libmkl_intel_thread.a -Wl,--end-group -lpthread -lm -ldl



Построим оценки масштабируемости реализации метода Якоби вычисления сингулярных чисел и векторов:
- По числу потоков: при увеличении числа потоков эффективность на рассмотренной области увеличивается при переходе от двух потоков к трем. Дальнейшее увеличение количества потоков приводит к снижению эффективности.
- По размеру задачи: наибольшая производительность достигается на матрицах размера 300x300 и 400x400. Дальнейшее увеличение размера матрицы не приводит к увеличению производительности.
Исследованная параллельная реализация, реализованная в библиотеке Intel MKL
2.5 Динамические характеристики и эффективность реализации алгоритма
2.6 Выводы для классов архитектур
2.7 Существующие реализации алгоритма
Несмотря на то, что метод Якоби является самым медленным из методов вычисления сингулярных чисел и векторов матрицы, он реализован в некоторых пакетах, например, LAPACK, ScaLAPACK, Intel MKL[7].
3 Литература
- ↑ Дж. Деммель «Вычислительная линейная алгебра» (стр. 261-264)
- ↑ Дж. Деммель «Вычислительная линейная алгебра» (стр. 261-264)
- ↑ Дж. Деммель «Вычислительная линейная алгебра» (стр. 244-245)
- ↑ Дж. Деммель «Вычислительная линейная алгебра» (стр. 261-263)
- ↑ Halil Snopce, Ilir Spahiu Parallel Computation of the SVD, pp. 458-460, http://www.wseas.us/e-library/conferences/2011/Paris/ECC/ECC-73.pdf
- ↑ V. Strumpen, H. Hoffmann, A. Agarwal A Stream Algorithm for the SVD, pp. 6-7, 23-24, http://publications.csail.mit.edu/lcs/pubs/pdf/MIT-LCS-TM-641.pdf
- ↑ Intel® Math Kernel Library, https://software.intel.com/ru-ru/node/521153#CAF8CA08-1C69-48F8-B0C3-B2B27AFA92FA